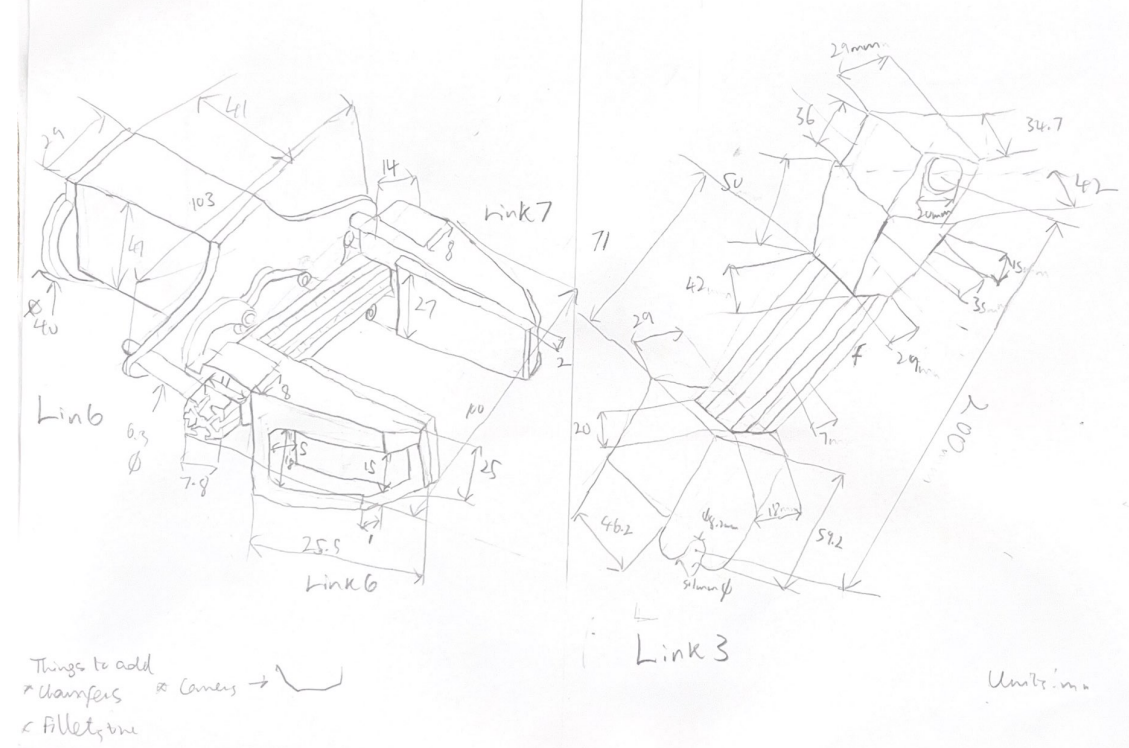
Parts & Design
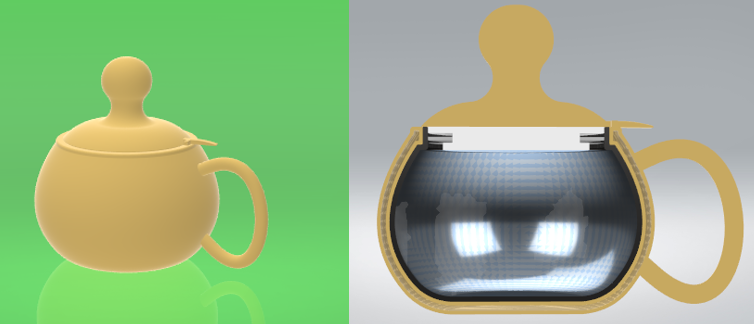
1. Double wall made of Calabash (native to Nigeria)
2. Main body based on Chinese cups and the lid of Nigerian Calabash lids
3. Internal Layer that contacts with liquid, made off AISI 304, a stainless steel alloy
4. Finger mechanism for single hand opening of the thermal cup (Ease of use for persons with hand/arm-related disabilities